

자동화 커넥터를 활용한 자동 조립 시연
IRISO 공업의 솔루션 「로봇 조립 적합 커넥터」를 탑재한 어플리케이션을, 다양한 로봇으로 조립해, 자동 조립의 공정을 재현한 데모스트레이션집입니다.
다양한 로봇 메이커와의 실시 실적이 있으므로, 구체적 사례와 함께 소개하겠습니다.
데모 목록
IRISO × YAMAHA
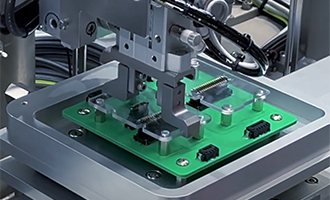
야마하 발동기님의 스칼라 로봇 「YK510XE」와 리니어 컨베이어 「LCMR200」을 사용해, 차재용 인버터의 파워 모듈 유닛을 실장 공정으로부터 조립 공정까지 1원화하는 완전 자동 조립을 이미지하고 있습니다.
기판 조립의 자동화로 과제로 되고 있는 더스트 방지 「캡」의 제거하는 공정도 스피디에 대응하는 것으로 양산 공정에 가까운 데모가 되고 있습니다.
파워 반도체의 리드는 게이트 기판에 탑재되고 있는 Z-Move 소켓 18021S로 끼워져 있어 진동 공진에 대응.
또, 기판간에 탑재된 커넥터는 Z-Move 기능을 탑재한 10120 시리즈와 플로팅 기능을 탑재한 10109 시리즈를 동일 기판에 탑재해, 플로팅의 메리트인 다수개 사용에 있어서도 끼워맞춤이 가능. 실장 오차나 조립 위치 어긋남을 흡수해 범용적으로 사용하는 스칼라 로봇과 리니어 컨베이어에 의한 자동 조립을 실현하고 있습니다.
기판 조립의 자동화로 과제로 되고 있는 더스트 방지 「캡」의 제거하는 공정도 스피디에 대응하는 것으로 양산 공정에 가까운 데모가 되고 있습니다.
파워 반도체의 리드는 게이트 기판에 탑재되고 있는 Z-Move 소켓 18021S로 끼워져 있어 진동 공진에 대응.
또, 기판간에 탑재된 커넥터는 Z-Move 기능을 탑재한 10120 시리즈와 플로팅 기능을 탑재한 10109 시리즈를 동일 기판에 탑재해, 플로팅의 메리트인 다수개 사용에 있어서도 끼워맞춤이 가능. 실장 오차나 조립 위치 어긋남을 흡수해 범용적으로 사용하는 스칼라 로봇과 리니어 컨베이어에 의한 자동 조립을 실현하고 있습니다.
IRISO × FANUC
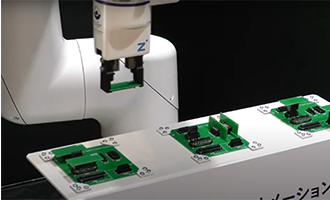
FANUC님의 협동 로봇 「CRX 시리즈」를 사용한 데모 보실 수 있습니다. 폐사의 주요한 플로팅 커넥터를 7종 실장한 3장의 기판에 자기판을 순환으로 연장하고 삽발을 반복하는 심플한 물건입니다만, 그러므로 각각의 특징을 알기 쉽게 느껴 주실 수 있다고 생각합니다.
폐사 커넥터가 가지는 플로팅 구조에 의해, 힘각·비전 센서 등을 사용하지 않는 로케이션의 티칭만의 작업에서도 확실하고 부드러운 기판 조립 작업을 실현하고 있습니다. 또한 CRX 시리즈의 협동 로봇 특유의 움직임도 부각되어 있습니다.
폐사 커넥터가 가지는 플로팅 구조에 의해, 힘각·비전 센서 등을 사용하지 않는 로케이션의 티칭만의 작업에서도 확실하고 부드러운 기판 조립 작업을 실현하고 있습니다. 또한 CRX 시리즈의 협동 로봇 특유의 움직임도 부각되어 있습니다.
IRISO × Universal Robots × Kowa Techmake × HIOS

유니버설 로봇님의 협동형 6축 다관절 로봇 「UR 시리즈」를 사용해, 상자형 모형을 조립하는 데모를 실시하고 있습니다.
내부 기판에는 Z-Move 커넥터 10120 시리즈가 탑재되어 있어, 플로팅 기능이 실장 오차를 흡수해, 로봇 조립을 실현시키고 있습니다.
또한, I/F부에는 Unit-able 커넥터가 탑재되어 있어, I/F 커넥터를 삽입할 때의 어긋남을 Z-Move 기능이 해소합니다.
Kowa Techmake 님의 다면 핸드를 장착, HIOS 님의 로봇용 전동 드라이버를 핸드에 실장하는 것으로, 기판 조립으로부터 나사 조임까지의 공정을 1대의 로봇으로 완전 재현하고 있습니다.
내부 기판에는 Z-Move 커넥터 10120 시리즈가 탑재되어 있어, 플로팅 기능이 실장 오차를 흡수해, 로봇 조립을 실현시키고 있습니다.
또한, I/F부에는 Unit-able 커넥터가 탑재되어 있어, I/F 커넥터를 삽입할 때의 어긋남을 Z-Move 기능이 해소합니다.
Kowa Techmake 님의 다면 핸드를 장착, HIOS 님의 로봇용 전동 드라이버를 핸드에 실장하는 것으로, 기판 조립으로부터 나사 조임까지의 공정을 1대의 로봇으로 완전 재현하고 있습니다.
IRISO × Mitsubishi × Kowa Techmake × HIOS
미쓰비시전기님의 6축 로봇 「RV-FR시리즈」를 3대 사용해, 소로트 다품종 생산품을 이미지 한 상자형 모형을 조립하는 데모를 실시하고 있습니다.
조립뿐만 아니라 워크의 공급 작업에서 나사 조임까지를 로봇으로 재현함으로써보다 완전 자동화에 가까운 상태를 재현하고 있습니다.
내부 기판의 접속에는 10120 시리즈를 탑재하고 있어, 플로팅 기능이 실장 오차를 흡수하면서 접속해, 로봇에서의 기판 감합을 완성시킵니다.
I/F부에는 Unit-able 커넥터를 채용해, 지금까지 자동 조립에 과제가 있던 소 로트 다품종 생산품의 자동화를 가능하게 하고 있습니다.
재료 공급부에는 협동 로봇을 사용함으로써 안전 울타리가 없는 것을 실현하고, 센서 및 드라이버의 출력 정보에 의한 양부 판정과 정보의 추적성도 실시하고 있습니다.
조립뿐만 아니라 워크의 공급 작업에서 나사 조임까지를 로봇으로 재현함으로써보다 완전 자동화에 가까운 상태를 재현하고 있습니다.
내부 기판의 접속에는 10120 시리즈를 탑재하고 있어, 플로팅 기능이 실장 오차를 흡수하면서 접속해, 로봇에서의 기판 감합을 완성시킵니다.
I/F부에는 Unit-able 커넥터를 채용해, 지금까지 자동 조립에 과제가 있던 소 로트 다품종 생산품의 자동화를 가능하게 하고 있습니다.
재료 공급부에는 협동 로봇을 사용함으로써 안전 울타리가 없는 것을 실현하고, 센서 및 드라이버의 출력 정보에 의한 양부 판정과 정보의 추적성도 실시하고 있습니다.
IRISO × ABB × HIOS

ABB님의 협동형 쌍완 로봇 「YuMi」로 차재 카메라 모듈을 조립하는 데모를 실시하고 있습니다.
모듈 내부의 기판에는 10126 시리즈가 탑재되어 있어, 플로팅 기능이 실장 오차를 흡수해, 로봇 조립을 실현시키고 있습니다.
HIOS 님의 로봇용 전동 드라이버를 YuMi에 실장하는 것으로, 조립부터 나사 조임까지의 공정을 완전 재현하고 있습니다.
모듈 내부의 기판에는 10126 시리즈가 탑재되어 있어, 플로팅 기능이 실장 오차를 흡수해, 로봇 조립을 실현시키고 있습니다.
HIOS 님의 로봇용 전동 드라이버를 YuMi에 실장하는 것으로, 조립부터 나사 조임까지의 공정을 완전 재현하고 있습니다.
IRISO × Mitsubishi × Kowa Techmake
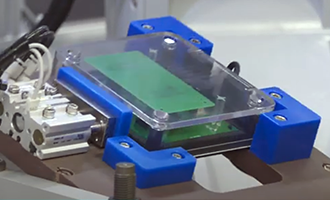
미쓰비시전기님의 6축 로봇 「RV-FR 시리즈」를 2대 사용해, PLC를 조립하는 데모를 실시하고 있습니다.
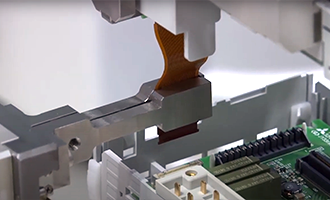
내부 기판에는 FPC/FFC 커넥터 11501 시리즈, 11600 시리즈가 탑재되어 있어, 논스톱으로 로봇으로의 FPC 카드 삽입을 실현하고 있습니다.
또한 메인 기판의 접속에는 10109 시리즈가 탑재되어 있어, 플로팅 기능이 실장 오차를 흡수하면서 접속해, 로봇에서의 세트의 조립을 완성시킵니다.
Kowa Techmake의 다면 핸드를 장착하여 로봇 1대당 2개의 기능을 부여하고 조립에서 다니는 상자로의 워크 정렬까지를 전자동으로 재현하고 있습니다.
내부 기판에는 FPC/FFC 커넥터 11501 시리즈, 11600 시리즈가 탑재되어 있어, 논스톱으로 로봇으로의 FPC 카드 삽입을 실현하고 있습니다.
또한 메인 기판의 접속에는 10109 시리즈가 탑재되어 있어, 플로팅 기능이 실장 오차를 흡수하면서 접속해, 로봇에서의 세트의 조립을 완성시킵니다.
Kowa Techmake의 다면 핸드를 장착하여 로봇 1대당 2개의 기능을 부여하고 조립에서 다니는 상자로의 워크 정렬까지를 전자동으로 재현하고 있습니다.