

利用自动化连接器的自动组装演示
这是一系列演示,通过使用各种各样的机器人组装配备有IRISO解决方案“机器人组装兼容连接器”的应用程序来重现自动化组装过程。
我们拥有与多家机器人制造商合作的良好记录,因此我们将介绍一些具体示例。
演示表
IRISO × YAMAHA
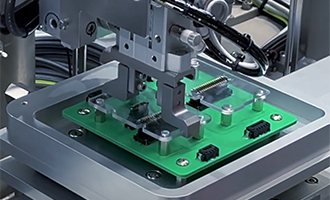
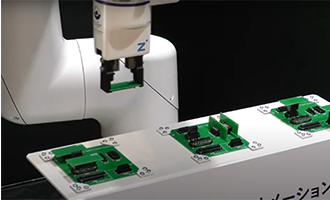
我们设想使用雅马哈汽车的SCARA机器人“YK510XE”和线性传送带“LCMR200”,实现车载逆变器电源模块单元的全自动组装,从而统一从安装到组装的流程。
自动化板组装中的去除防尘“帽”的过程也可以快速处理,使其成为接近量产过程的演示。
功率半导体引线与安装在门板上的 Z-Move 插座 18021S 配合,支持振动共振。
此外,安装在板之间的连接器包括同一板上具有Z-Move功能的10120系列和具有浮动功能的10109系列,即使使用多个连接器也可以进行配对,这就是浮动的优势。我们使用SCARA机器人和线性输送机实现了自动装配,这些机器人用于通用目的并吸收安装误差和装配位置偏差。
自动化板组装中的去除防尘“帽”的过程也可以快速处理,使其成为接近量产过程的演示。
功率半导体引线与安装在门板上的 Z-Move 插座 18021S 配合,支持振动共振。
此外,安装在板之间的连接器包括同一板上具有Z-Move功能的10120系列和具有浮动功能的10109系列,即使使用多个连接器也可以进行配对,这就是浮动的优势。我们使用SCARA机器人和线性输送机实现了自动装配,这些机器人用于通用目的并吸收安装误差和装配位置偏差。
IRISO × FANUC
您可以观看使用FANUC协作机器人“CRX系列”的演示。这是一个简单的产品,由 3 块板组成,上面安装了 7 种我们的主要浮动连接器,并且子板以圆周运动无休止地插入和移除,但我认为这就是为什么您可以轻松了解每块板的特性。
即使仅需要位置示教而不使用力或视觉传感器,我们的连接器的浮动结构也可以实现可靠、平滑的电路板组装。它还突出了CRX系列协作机器人独特的动作。
即使仅需要位置示教而不使用力或视觉传感器,我们的连接器的浮动结构也可以实现可靠、平滑的电路板组装。它还突出了CRX系列协作机器人独特的动作。
IRISO × Universal Robots × Kowa Techmake × HIOS

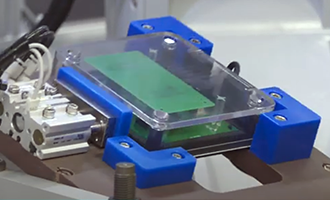
我们正在演示如何使用Universal Robots的协作6轴关节型机器人“UR系列”组装箱形模型。
内部板配备Z-Move连接器10120系列,其浮动功能吸收安装误差,使机器人组装成为可能。
此外,I/F部分配备了可单元连接器,并且Z-Move功能消除了插入I/F连接器时的错位。
通过安装Kowa Techmake的多面手并将HIOS的机器人电动螺丝刀安装到手上,我们能够用一台机器人完整地再现从电路板组装到螺丝拧紧的过程。
内部板配备Z-Move连接器10120系列,其浮动功能吸收安装误差,使机器人组装成为可能。
此外,I/F部分配备了可单元连接器,并且Z-Move功能消除了插入I/F连接器时的错位。
通过安装Kowa Techmake的多面手并将HIOS的机器人电动螺丝刀安装到手上,我们能够用一台机器人完整地再现从电路板组装到螺丝拧紧的过程。
IRISO × Mitsubishi × Kowa Techmake × HIOS
我们使用三台三菱电机的 6 轴机器人“RV-FR 系列”,演示如何组装以小批量、多品种产品为模型的箱形模型。
除了组装之外,我们还使用机器人来执行从供应工件到拧紧螺钉的所有工作,再现接近完全自动化的条件。
配备用于内部电路板连接的 10120 系列,浮动功能允许连接,同时吸收安装误差,并使用机器人完成电路板插接。
I/F部分使用了可单元化的连接器,使得以前在自动组装方面存在问题的小批量、多品种生产产品的自动化成为可能。
通过在物资供应部门使用协作机器人,我们实现了安全围栏的无存在,并根据传感器和驱动器的输出信息实现合格/不合格判断和信息追溯。
除了组装之外,我们还使用机器人来执行从供应工件到拧紧螺钉的所有工作,再现接近完全自动化的条件。
配备用于内部电路板连接的 10120 系列,浮动功能允许连接,同时吸收安装误差,并使用机器人完成电路板插接。
I/F部分使用了可单元化的连接器,使得以前在自动组装方面存在问题的小批量、多品种生产产品的自动化成为可能。
通过在物资供应部门使用协作机器人,我们实现了安全围栏的无存在,并根据传感器和驱动器的输出信息实现合格/不合格判断和信息追溯。
IRISO × ABB × HIOS

我们正在演示如何使用ABB的协作双臂机器人“YuMi”组装车载摄像头模块。
10126系列安装在模块内部的板上,其浮动功能吸收安装误差,使机器人组装成为可能。
通过将HIOS的机器人电动螺丝刀植入YuMi中,我们可以完整重现从组装到拧紧螺丝的过程。
10126系列安装在模块内部的板上,其浮动功能吸收安装误差,使机器人组装成为可能。
通过将HIOS的机器人电动螺丝刀植入YuMi中,我们可以完整重现从组装到拧紧螺丝的过程。
IRISO × Mitsubishi × Kowa Techmake
我们正在演示使用两台三菱电机 6 轴机器人“RV-FR 系列”组装 PLC。
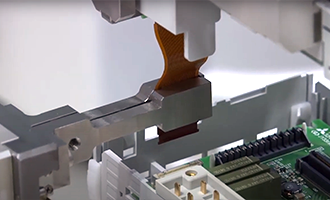
内部电路板配备11501系列和11600系列的FPC/FFC 连接器,可实现不停机机器人FPC卡插入。
10109系列用于连接主板,浮动功能可在连接时吸收安装误差,使用机器人完成整套组装。
通过安装 Kowa Techmake 的多面手,每个机器人都具有两种功能,从组装到将工件排列到可回收箱中的流程完全自动化。
内部电路板配备11501系列和11600系列的FPC/FFC 连接器,可实现不停机机器人FPC卡插入。
10109系列用于连接主板,浮动功能可在连接时吸收安装误差,使用机器人完成整套组装。
通过安装 Kowa Techmake 的多面手,每个机器人都具有两种功能,从组装到将工件排列到可回收箱中的流程完全自动化。