
684製品(+検索条件に近い結果 0 製品)
| 画像 | 製品名 | カテゴリ | シリーズ | 極数 | 嵌合部ピッチ | 基板実装方法 | 嵌合形状 | 本体高さ(mm) | 定格電圧-AC(V) | 定格電圧-DC(V) | 定格電流(A) | 耐電圧-AC(V) | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
比較検討リストのご利用には会員ログインが必要となります 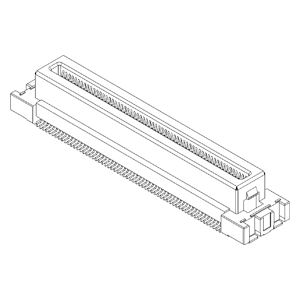
|
ロボット組立適合コネクタIMSA-9984S-120Y942デジタル信号の高速伝送を可能とする0.5mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向に0.5mm可動。Z方向は0.5mmの有効嵌合長有。1.0Gbps(自社定義による代表参考値)の高速伝送に対応。インピーダンスマッチング:差動100Ω。嵌合高さ8.0mm~15.0mmの平行接続に対応しタフな環境でも確実に異物の除去を行う2点接点コンタクト採用。 |
基板対基板コネクタ | 9984S | 120 | 0.5 | SMT | Stacking | 6.4 | 50 | 50 | 0.4 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 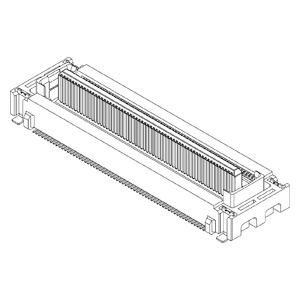
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9984B-120Y910デジタル信号の高速伝送を可能とする0.5mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向に0.5mm可動。Z方向は0.5mmの有効嵌合長有。1.0Gbps(自社定義による代表参考値)の高速伝送に対応。インピーダンスマッチング:差動100Ω。嵌合高さ8.0mm~15.0mmの平行接続に対応しタフな環境でも確実に異物の除去を行う2点接点コンタクト採用。 |
基板対基板コネクタ | 9984B | 120 | 0.5 | SMT | Stacking | 6.55 | 50 | 50 | 0.4 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 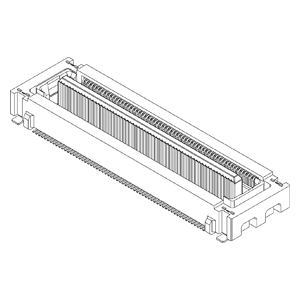
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9984B-120Y900デジタル信号の高速伝送を可能とする0.5mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向に0.5mm可動。Z方向は0.5mmの有効嵌合長有。1.0Gbps(自社定義による代表参考値)の高速伝送に対応。インピーダンスマッチング:差動100Ω。嵌合高さ8.0mm~15.0mmの平行接続に対応しタフな環境でも確実に異物の除去を行う2点接点コンタクト採用。 |
基板対基板コネクタ | 9984B | 120 | 0.5 | SMT | Stacking | 5.55 | 50 | 50 | 0.4 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 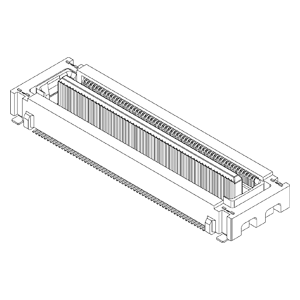
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9984B-120Y912デジタル信号の高速伝送を可能とする0.5mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向に0.5mm可動。Z方向は0.5mmの有効嵌合長有。1.0Gbps(自社定義による代表参考値)の高速伝送に対応。インピーダンスマッチング:差動100Ω。嵌合高さ8.0mm~15.0mmの平行接続に対応しタフな環境でも確実に異物の除去を行う2点接点コンタクト採用。 |
基板対基板コネクタ | 9984B | 120 | 0.5 | SMT | Stacking | 5.55 | 50 | 50 | 0.4 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります |
フローティングコネクタ Z-Move ロボット組立適合コネクタIMSA-9851B-14Y9211.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向に0.5mm、Z方向は0.4mm有効嵌合長。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9851B | 14 | 1 | SMT | Stacking | 5 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 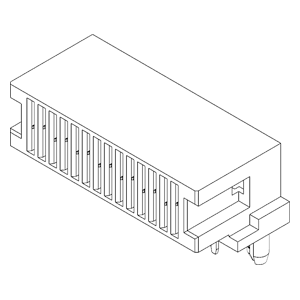
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9892S-14Z9011.25mmピッチ、フローティングタイプ水平接続(RA/RA)BtoBコネクタ。可動(フローティング)構造でX-Y方向に1.0mm可動。Z方向は1.0mmの有効嵌合長。こじり挿抜時のコンタクト変形防止をはかった設計構造。 |
基板対基板コネクタ | 9892S | 14 | 1.25 | DIP | RightAngle | 7.2 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります |
フローティングコネクタ ロボット組立適合コネクタIMSA-9890S-14Y9961.25mmピッチ、フローティングタイプ垂直接続(ST/RA)BtoBコネクタ。可動(フローティング)構造でX-Y方向に1.0mm可動。Z方向は1.0mmの有効嵌合長。こじり挿抜時のコンタクト変形防止をはかった設計構造。 |
基板対基板コネクタ | 9890S | 14 | 1.25 | SMT | Stacking | 6 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 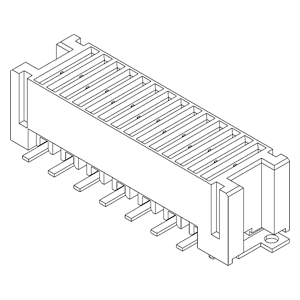
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9890S-14Y8081.25mmピッチ、フローティングタイプ垂直接続(ST/RA)BtoBコネクタ。可動(フローティング)構造でX-Y方向に1.0mm可動。Z方向は1.0mmの有効嵌合長。こじり挿抜時のコンタクト変形防止をはかった設計構造。 |
基板対基板コネクタ | 9890S | 14 | 1.25 | SMT | Stacking | 6 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 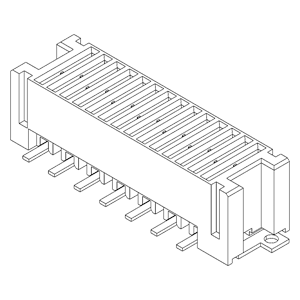
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9890S-14Y8071.25mmピッチ、フローティングタイプ垂直接続(ST/RA)BtoBコネクタ。可動(フローティング)構造でX-Y方向に1.0mm可動。Z方向は1.0mmの有効嵌合長。こじり挿抜時のコンタクト変形防止をはかった設計構造。 |
基板対基板コネクタ | 9890S | 14 | 1.25 | SMT | Stacking | 6 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 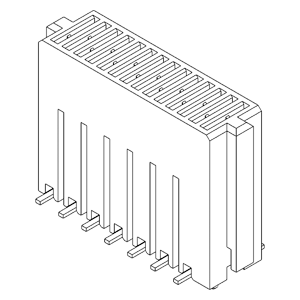
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9856S-14Y9561.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向にX/Y/Z:±0.8/±0.5/Z方向は±0.4mmの有効嵌合長。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9856S | 14 | 1 | SMT | Stacking | 11.5 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9855S-14Y9451.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向に0.5mm、Z方向は0.4mm有効嵌合長。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9855S | 14 | 1 | SMT | Stacking | 4.35 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9855S-14Y9431.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向に0.5mm、Z方向は0.4mm有効嵌合長。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9855S | 14 | 1 | SMT | Stacking | 4.35 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 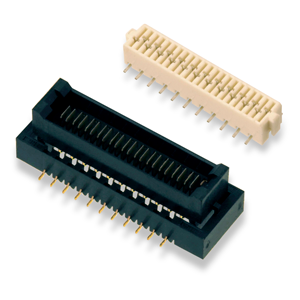
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9855B-14Y9301.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向に0.5mm、Z方向は0.4mm有効嵌合長。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9855B | 14 | 1 | SMT | Stacking | 4.4 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります |
フローティングコネクタ ロボット組立適合コネクタIMSA-9854S-14Y8011.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y-Z方向にX/Y/Z:±0.8/±0.5/±0.8可動構造。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9854S | 14 | 1 | SMT | Stacking | 8 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9854B-14D-T1.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y-Z方向にX/Y/Z:±0.8/±0.5/±0.8可動構造。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9854B | 14 | 1 | DIP | Stacking | 11.4 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 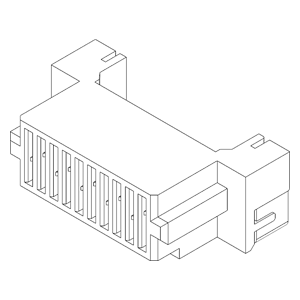
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9853S-14Y9321.0mmピッチ、フローティングタイプBtoBコネクタ。可動(フローティング)構造でX-Y-Z方向にX/Y/Z:±0.8/±0.5/±0.8可動構造。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9853S | 14 | 1 | SMT | RightAngle | 5.225 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 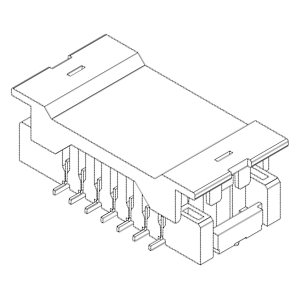
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9853B-14Y9071.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y-Z方向にX/Y:±0.8/±0.5/ Z方向は0.8mmの有効嵌合長。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9853B | 14 | 1 | SMT | Stacking | 6.8 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 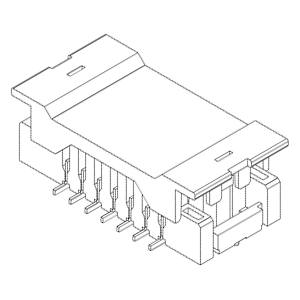
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9853B-14Y9141.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y-Z方向にX/Y:±0.8/±0.5/ Z方向は0.8mmの有効嵌合長。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9853B | 14 | 1 | SMT | Stacking | 6.8 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 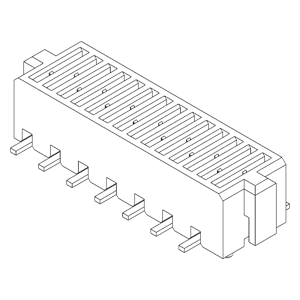
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9851S-14Y9261.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向に0.5mm、Z方向は0.4mm有効嵌合長。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9851S | 14 | 1 | SMT | Stacking | 3.85 | 125 | 125 | 1 | 250 | |
|
比較検討リストのご利用には会員ログインが必要となります 
|
フローティングコネクタ ロボット組立適合コネクタIMSA-9851S-14Y9241.0mmピッチ、フローティングタイプ平行接続(ST/ST)BtoBコネクタ。可動(フローティング)構造でX-Y方向に0.5mm、Z方向は0.4mm有効嵌合長。(組み合わせにより可動範囲は異なります。)嵌合コネクタにより各種基板間寸法に対応。 |
基板対基板コネクタ | 9851S | 14 | 1 | SMT | Stacking | 3.85 | 125 | 125 | 1 | 250 |