

- Top
- Technical Info
- solution
- automation connector
- List of demonstrations
Demonstration of Robot assembly using automation connectors
This is a collection of demonstrations that recreate Robot assembly process by assembling applications equipped with IRISO' solution, "Automation Connector," using a wide variety of robots.
We have a track record of working with various robot manufacturers, so we will introduce some specific examples.
List of demonstrations
IRISO × YAMAHA
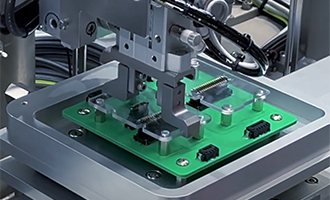
We envision a fully Robot assembly uses Yamaha Motor's SCARA robot "YK510XE" and linear conveyor "LCMR200" to centralize the process from mounting to assembly of power module units for in-vehicle inverters.
The process of removing the dust-prevention "caps," which is a challenge in automating circuit board assembly, can also be handled quickly, making this a demonstration that is close to a mass production process.
The leads of the power semiconductor are Mating in the Z-Move structure Socket 18021S mounted on the gate substrate to accommodate vibration resonance.
In addition, the connectors mounted between the boards are the 10120 series with Z-Move structure and the 10109 series with Floating structure, both mounted on the same board, allowing for the advantage of Floating structure to be Mating even when used in large numbers.Automatic Robot assembly is achieved by the general-purpose SCARA robot and linear conveyor, which absorbs mounting misalinment and assembly position deviations.
The process of removing the dust-prevention "caps," which is a challenge in automating circuit board assembly, can also be handled quickly, making this a demonstration that is close to a mass production process.
The leads of the power semiconductor are Mating in the Z-Move structure Socket 18021S mounted on the gate substrate to accommodate vibration resonance.
In addition, the connectors mounted between the boards are the 10120 series with Z-Move structure and the 10109 series with Floating structure, both mounted on the same board, allowing for the advantage of Floating structure to be Mating even when used in large numbers.Automatic Robot assembly is achieved by the general-purpose SCARA robot and linear conveyor, which absorbs mounting misalinment and assembly position deviations.
IRISO × FANUC
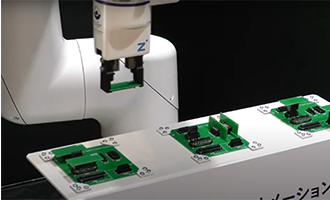
You can see a demonstration using FANUC's collaborative robot "CRX series". It's a simple product that consists of 3 boards with 7 types of our main Floating Connector mounted on them, and child boards are inserted and removed endlessly in a circular motion, but I think that's why it's easy to understand the characteristics of each one.
Floating structure of our connectors allows for reliable and smooth board assembly even when only location teaching is required without using force or Vision sensor. It also highlights the movements unique to the CRX series collaborative robots.
Floating structure of our connectors allows for reliable and smooth board assembly even when only location teaching is required without using force or Vision sensor. It also highlights the movements unique to the CRX series collaborative robots.
IRISO × Universal Robots × Kowa Techmake × HIOS

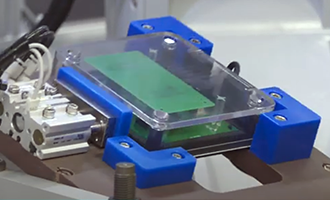
We are demonstrating how to assemble a box-shaped mock-up using Universal Robot's Collaborative 6-axis articulated robots "UR series".
The Z-Move structure connector 10120 series is mounted on the Internal board, and the Floating structure absorbs mounting misalinment and realizes robot assembly.
In addition, the I/F part is equipped with a Unit-able Connector, and the Z-Move structure eliminates misalignment when inserting the Interface Connector.
By installing Kowa Techmake's Multifaceted robot hand and mounting an electric screwdriver for robots from HIOS on the hand, the process from board assembly to screw tightening can be completely reproduced with a single robot.
The Z-Move structure connector 10120 series is mounted on the Internal board, and the Floating structure absorbs mounting misalinment and realizes robot assembly.
In addition, the I/F part is equipped with a Unit-able Connector, and the Z-Move structure eliminates misalignment when inserting the Interface Connector.
By installing Kowa Techmake's Multifaceted robot hand and mounting an electric screwdriver for robots from HIOS on the hand, the process from board assembly to screw tightening can be completely reproduced with a single robot.
IRISO × Mitsubishi × Kowa Techmake × HIOS
Using 3 units of Mitsubishi Electric's 6-axis articulated robots "RV-FR series", we are demonstrating how to assemble a box-shaped mock-up with the image of High-Mix Low-Volume.
By using robots to reproduce not only assembly, but also work Supplying and screw tightening, we are able to reproduce a state closer to full automation.
The 10120 series is installed for the connection of the Internal board, and the Floating structure absorbs mounting misalinment while connecting, completing board Mating with a robot.
A Unit-able Connector is used in the I/F section, enabling automation of High-Mix Low-Volume which has been a problem with Robot assembly.
Collaborative robots are used in the material supply section to eliminate the need for safety fences, and pass/fail judgments and information traceability are also implemented based on output information from sensors and drivers.
By using robots to reproduce not only assembly, but also work Supplying and screw tightening, we are able to reproduce a state closer to full automation.
The 10120 series is installed for the connection of the Internal board, and the Floating structure absorbs mounting misalinment while connecting, completing board Mating with a robot.
A Unit-able Connector is used in the I/F section, enabling automation of High-Mix Low-Volume which has been a problem with Robot assembly.
Collaborative robots are used in the material supply section to eliminate the need for safety fences, and pass/fail judgments and information traceability are also implemented based on output information from sensors and drivers.
IRISO × ABB × HIOS

We are demonstrating how to assemble an in-vehicle camera module with ABB's Collaborative Dual-arm robot "YuMi".
The 10126 series is mounted on the board inside the module, and the Floating structure absorbs mounting misalinment, enabling robot assembly.
By mounting an electric screwdriver for HIOS robots on YuMi, the process from assembly to screw tightening is completely reproduced.
The 10126 series is mounted on the board inside the module, and the Floating structure absorbs mounting misalinment, enabling robot assembly.
By mounting an electric screwdriver for HIOS robots on YuMi, the process from assembly to screw tightening is completely reproduced.
IRISO × Mitsubishi × Kowa Techmake
We are demonstrating how to assemble a PLC using two Mitsubishi Electric 6-axis articulated robots "RV-FR series".
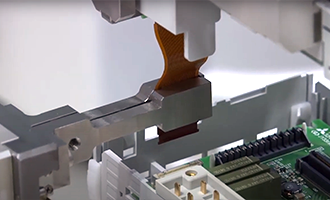
FPC / FFC Connectors 11501 series and 11600 series are mounted on the Internal board, realizing non-stop FPC card insertion by robots.
In addition, the 10109 series is mounted on the connection of the main board, and the Floating structure connects while absorbing mounting misalinment to complete the assembly of the set with a robot.
By attaching Kowa Techmake's multi-Multifaceted robot hand, two functions are given to each robot, and everything from assembly to work alignment in Returnable Box is fully automated.
FPC / FFC Connectors 11501 series and 11600 series are mounted on the Internal board, realizing non-stop FPC card insertion by robots.
In addition, the 10109 series is mounted on the connection of the main board, and the Floating structure connects while absorbing mounting misalinment to complete the assembly of the set with a robot.
By attaching Kowa Techmake's multi-Multifaceted robot hand, two functions are given to each robot, and everything from assembly to work alignment in Returnable Box is fully automated.